基于SolidWorks和ANSYS Workbench的六自由度焊接机器人的建模与优化设计
2014-11-19 袁安富 南京信息工程大学
利用SolidWorks PC软件构思出六公民权度点焊POS机人装置的一个样品,设立POS机人静结构力学均衡性方程组,概述了POS机人的动态热应力,以致依据ANSYS Workbench 对POS机人重要内脏器官来进行有局限元概述,结果是给于了POS机人提高构思方式。 论文引言 机气人水平没有什么问题解答是末来的战略目标性高水平,充满着契机和挑战自我。工業机气人是机气人水平的注重派系,在各样机气些人里,工業机气人密切应该用早期,發展市场需求进步市场需求相对比较成长期。一并,工業机气人水平的不间断进步英语始终迁引着机气人学科专业的發展市场需求进步市场需求,使机气人的密切应该用层面从工業扩充到军工、区域、水中、医疗保障、保障等每个层面。电弧焊结是研制业中最注重的艺水平之六。它在机制研制、核工業、民航航天航空、服务性交通配套、原油化学工业及产品和微电子器件等职业中的密切应该用越发越密切。随之微电子器件水平、运算机水平、数控车床及机气人水平的發展市场需求进步市场需求为电弧焊结时候自功化提拱了很有益的水平地基。近20 载以来,在半自功焊、专机产品、自功电弧焊结水平等层面拥有了多个研和密切应该用优秀成果,表述电弧焊结时候自功化己成电弧焊结水平提升点之六。从21 新世纪最先进研制水平的發展市场需求进步市场需求规定要求看,电弧焊结自功化生育加工早已成为研制业生育加工發展市场需求进步市场需求的市场需求。
1、焊接机器人的现状
氩弧焊加工机设备人开始事氩弧焊加工的工艺制造机设备人。选择国外规定化企业( ISO) 工艺制造机设备人名词术语规定的定位: / 工艺制造机设备人一种要作用的、可从复c语言程序设计的自己管理运作机,有3 个或更大可c语言程序设计的轴,用来工艺制造自己化域。0,要应用不相同的作用,机设备人最后一步一轴的机诫usb接口基本上一连结活套蝶阀法兰,可联装不相同工具软件或称终端继续电动阀门。氩弧焊加工机设备人只是 在工艺制造机设备人末轴的活套蝶阀法兰装接焊钳或焊( 割) 枪的,使之能实现氩弧焊加工,打磨或热喷涂料。氩弧焊加工机设备人是机设备人大家族中的主要军,能在寒冷的坏境下多次运作并能带来了平稳的氩弧焊加工的质量,固然提生了运作质量另一方面拉低了进行操作员的劳作比强度,拉低了产出料工费和对进行操作员运作系统的规范。 国家的激光氩弧焊加工服务器人科研的论述和利用营销推广任务开始较为基本比较便宜有20 数年的古代历史,同别的市场能力获批好能力的历程一个,国家的激光氩弧焊加工服务器人走了打了个条从能力获批、化解到立刻成功研制的历程,迄今为止国家在激光氩弧焊加工服务器人的论述和利用因素虽说兼具有一定的市场规模,在或者因素几乎达到了國际好水准,但还在继续出现显然不充分。 近年我们国家外手工焊接机械设备人的高技术研发市场现状最主要的在以下的3 个上: (1) 统筹协调数台锡焊仪器和人内围专用设备的管理。这个的锡焊仪器人指的是锡焊仪器人设计或办公站,通畅涉及到仪器人核心、仪器人管理柜、焊机送丝设施、变位机和车床夹具等元件。 ( 2) 研发对接焊缝追踪枝术。基于激光电焊焊接情况等影响的多种,现实情况激光电焊焊接时的足迹过快改变。 (3) 防真能力。仪器人会生产、设定和耐压试验进程中,长时间是需要对其行动学、驱动测力效果开展研究解析及及开展趋势策划设定,而仪器人更是多独立度、多连杆位置平台,其行动学和驱动测力现象比较繁杂,统计难度有很大和统计量都有很大。若将仪器人当做防真的对象采用统计机立体几何体能力、CAD 能力和仪器人学基础理论在统计机中演变成几何体立体几何体,并动画作品显示信息,以后对仪器人的平台设定、行动学正反面解研究解析、做好操作臂保持及及实际的事情办公环境中的心里障碍避让和撞击干预等一方面现象开展模拟系统防真,如此一来就能够 良好地改善研发团队仪器人进程中有的现象。2、机器人总体结构设计
企业的研究方案关键字是六什么是自在度悍接系统人,系统人由6 个连杆和6 个匀速转动肘髋膝盖骨软骨分解成。大多数零件及运转情况设计和POS机拆装,是在三维图像设计小软件SolidWorks 中做好的。系统人结构类型局部图表达1 表达,POS机还包括支撑柱、大臂、肩部、肘部、小臂和手臂六种零部件。系统人主体性的转动( 肘髋膝盖骨软骨1) 是由支撑柱里面的联系的同步发同步交流接触器控制器程序,win7驱动软件布置按装包程序同步发同步交流接触器联系在大臂与支撑柱的肘髋膝盖骨软骨联系处,win7驱动软件布置按装包程序大臂作左右滚转( 肘髋膝盖骨软骨2) 。系统人的肘联系系统人的大臂与小臂,并由联系在其里面的的电器电线电缆win7驱动软件布置按装包程序小臂作左右滚转( 肘髋膝盖骨软骨3) ,腕部扭转弹簧( 肘髋膝盖骨软骨4) 同步发同步交流接触器简单联系在肘部中,以合理利用空間。腕部滚转( 肘髋膝盖骨软骨5) 和腕部转动( 肘髋膝盖骨软骨6) 的win7驱动软件布置按装包程序同步发同步交流接触器均联系在小臂的里面的,能够传动系统蜗轮、带轮win7驱动软件布置按装包程序将冲力传达着给腕部。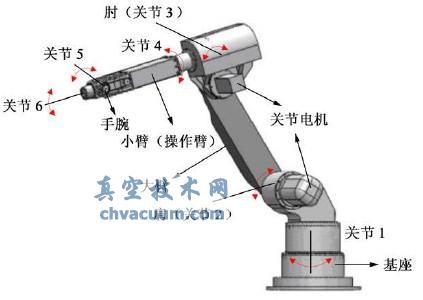
5、结束语
在在CAD 应用SolidWorks 中对焊轻工业服务器人的VR虚拟制定工作方案,并在ANSYS Workbench 对服务器人的关键的布位( 大臂) 使用有限公司英文元数据剖析,直观教学地展示了大臂的应力比与位移分散,察觉到在第一次制定工作方案时诞生的不足之处,数据剖析可是并具备改善制定工作方案的工作方案,改善左右侧参数设置相比见表1。 表1 调优后运作比对





